Главная
Электронника
AI WAVE 2016 wheel config
Рулевой модуль
Рулевое колесо из дерева
Стойка для руля с креслом
Педали
Деревянные рамы велосипедов своими руками
Делал из всяких обрезков, так как наверно придется переделывать.
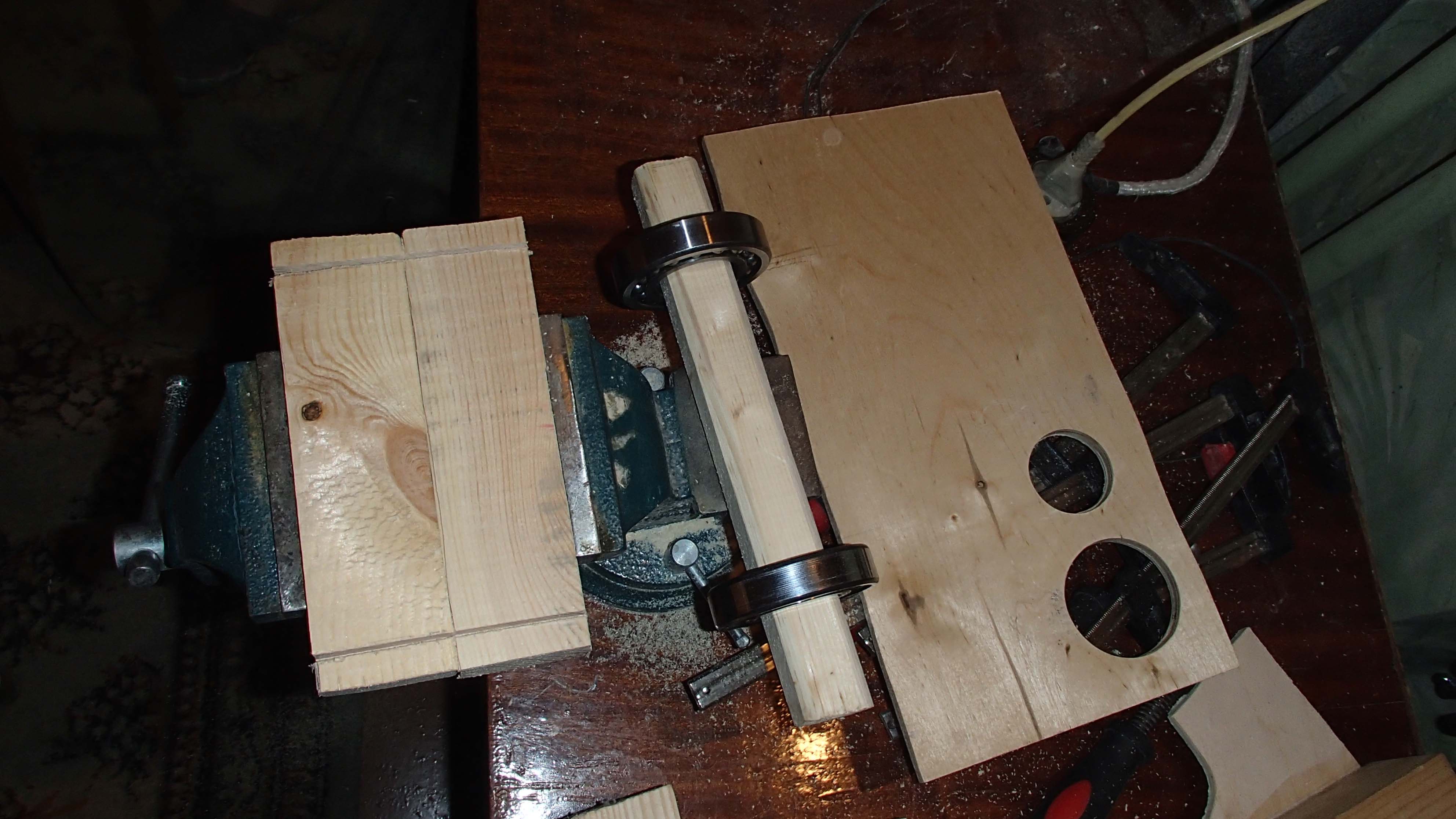

Вал сделан из рейки путем сошлифовывания граней.
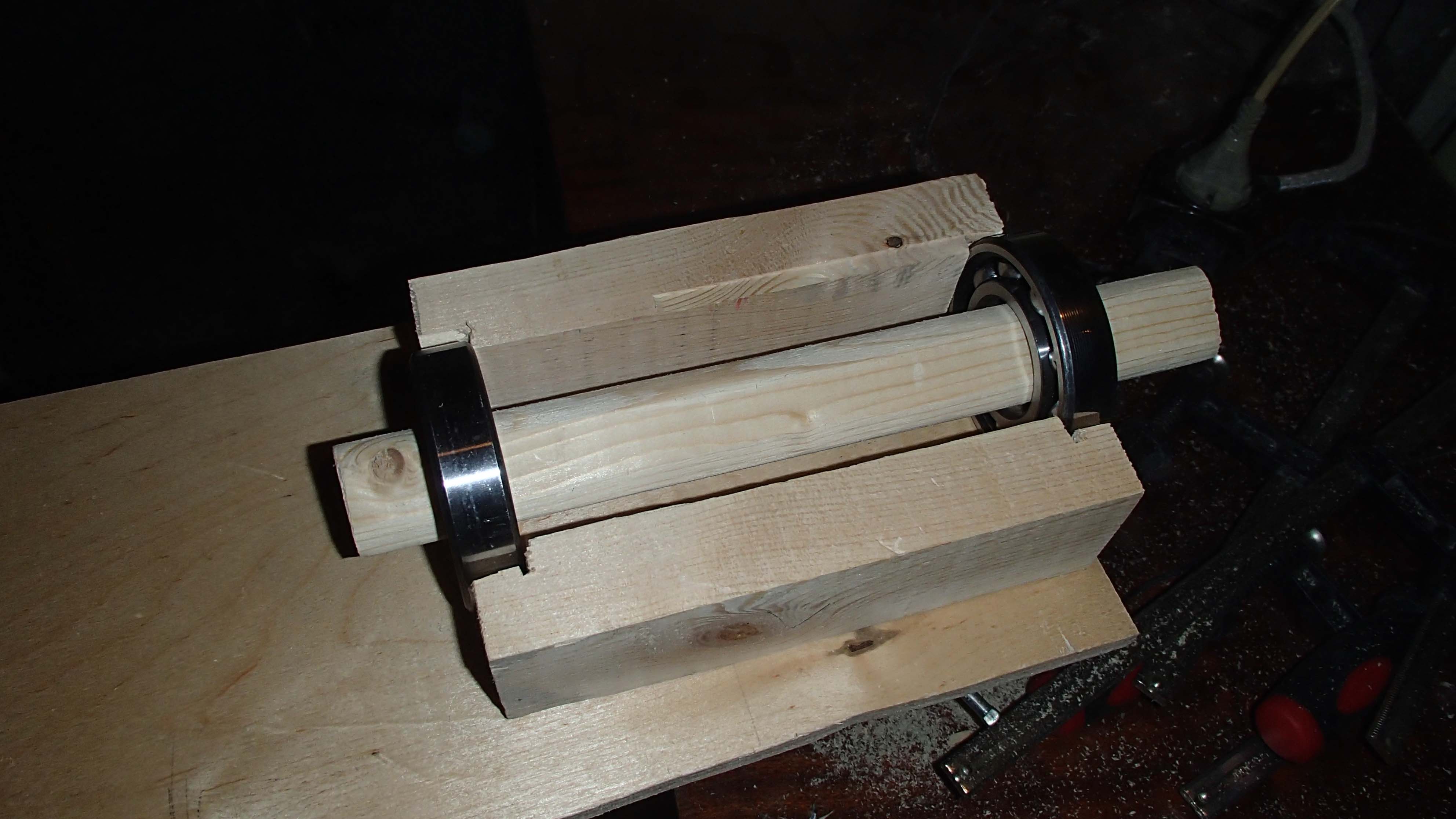
Эти две деревяшки приклеены к доске.

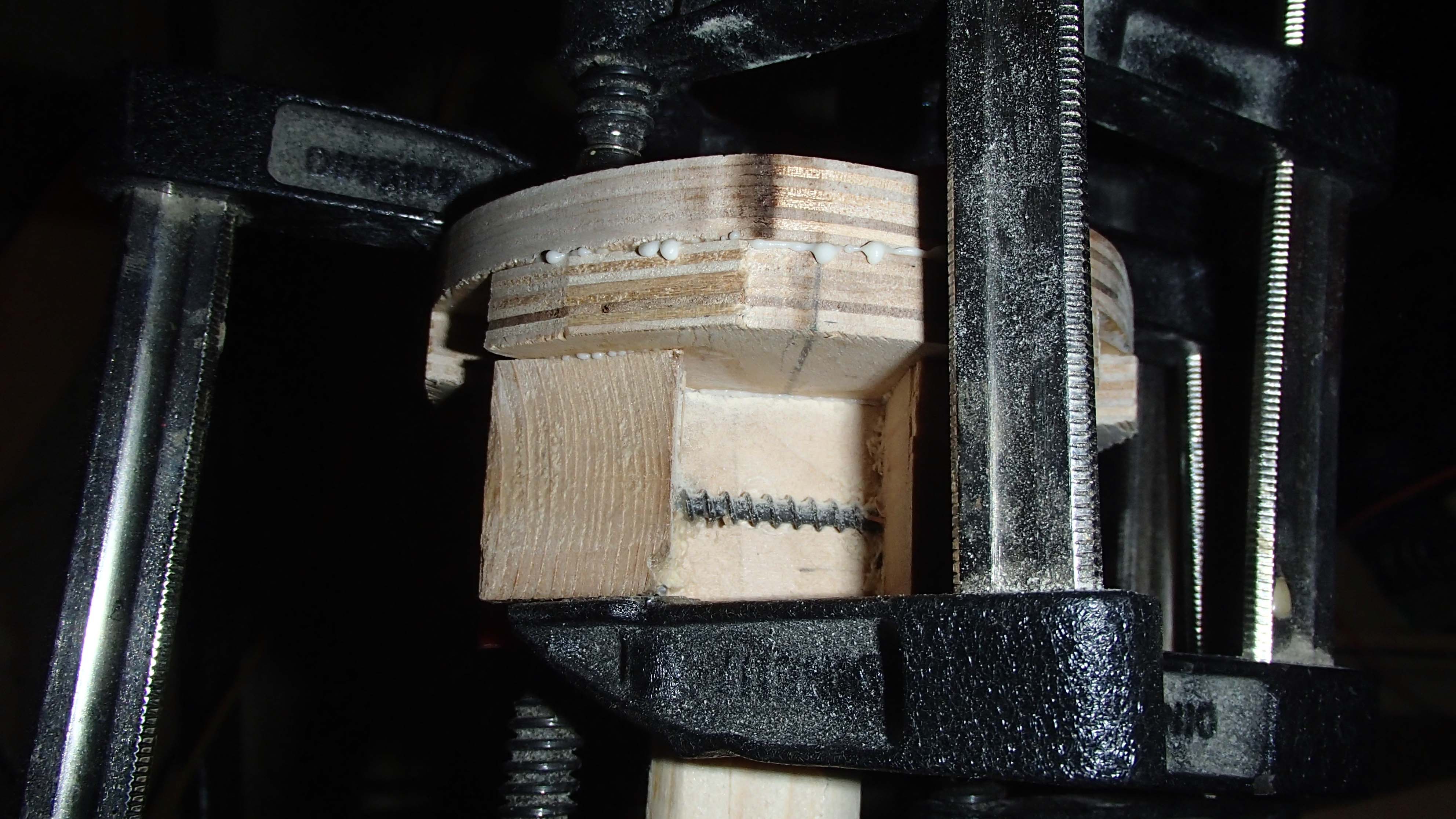
Внутренний диаметр подшипника 32мм.



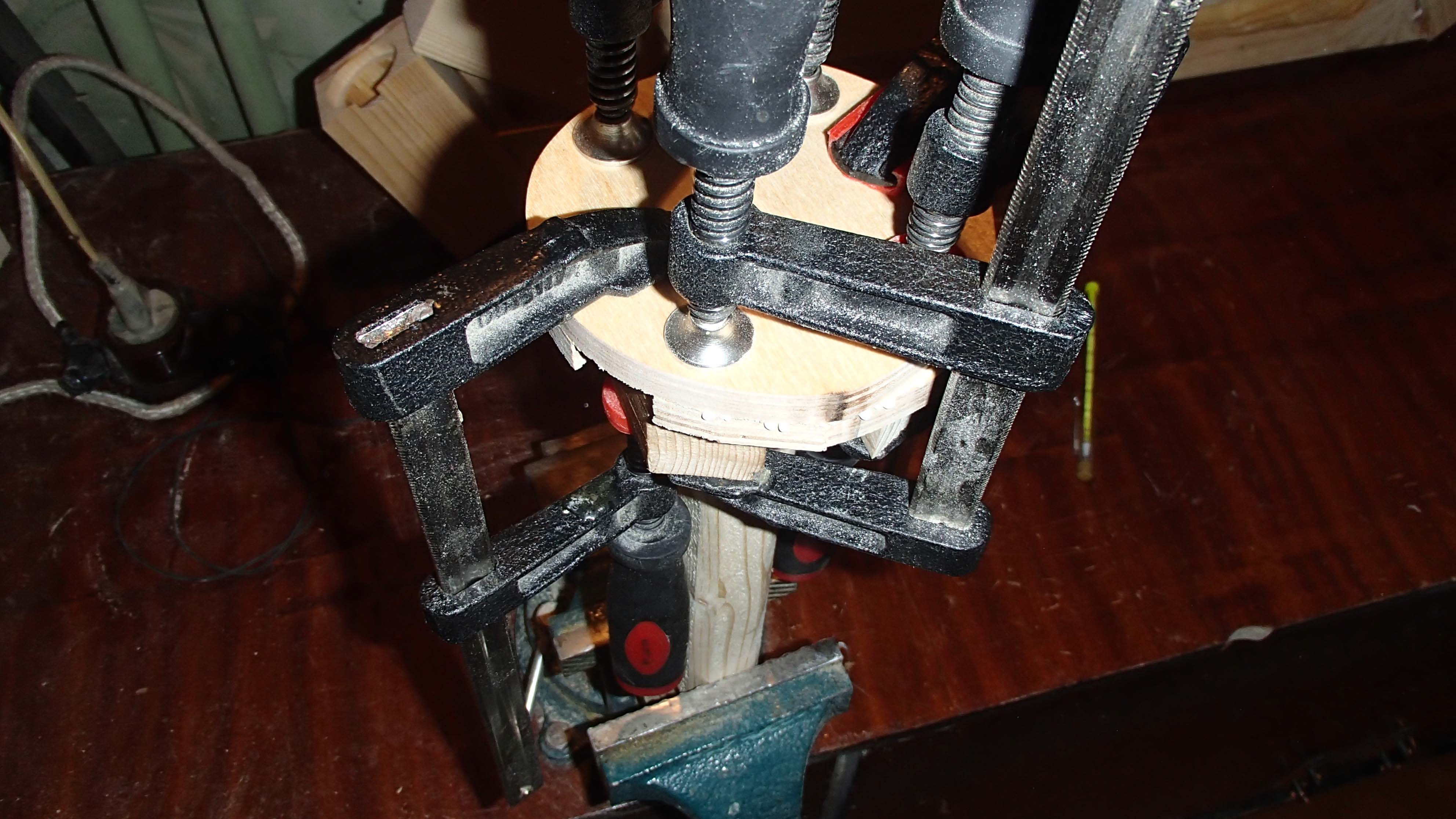
Приклеиваем ограничители, они упираются в подшипник.
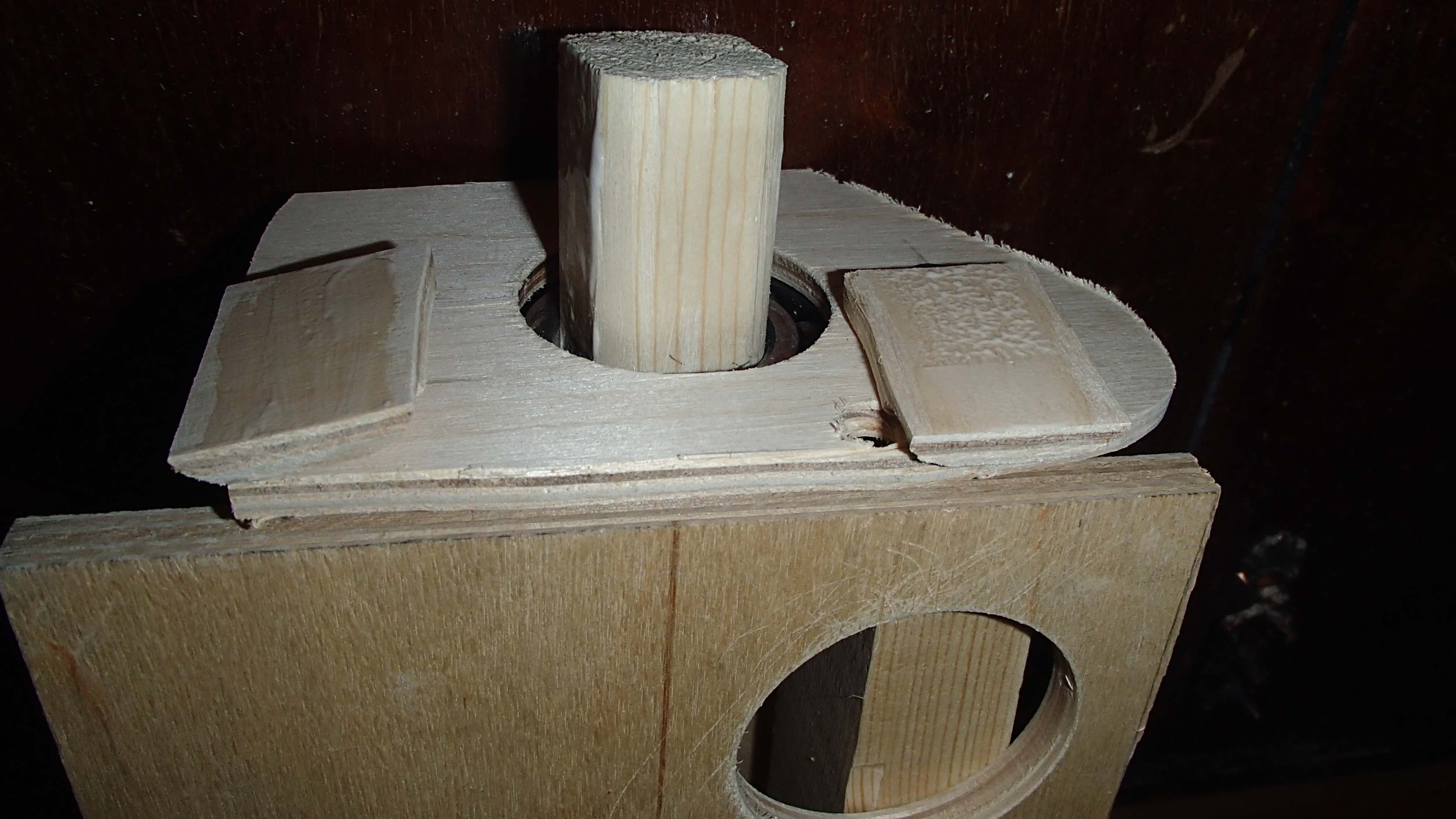

Приклеиваем дальше крепление для руля.

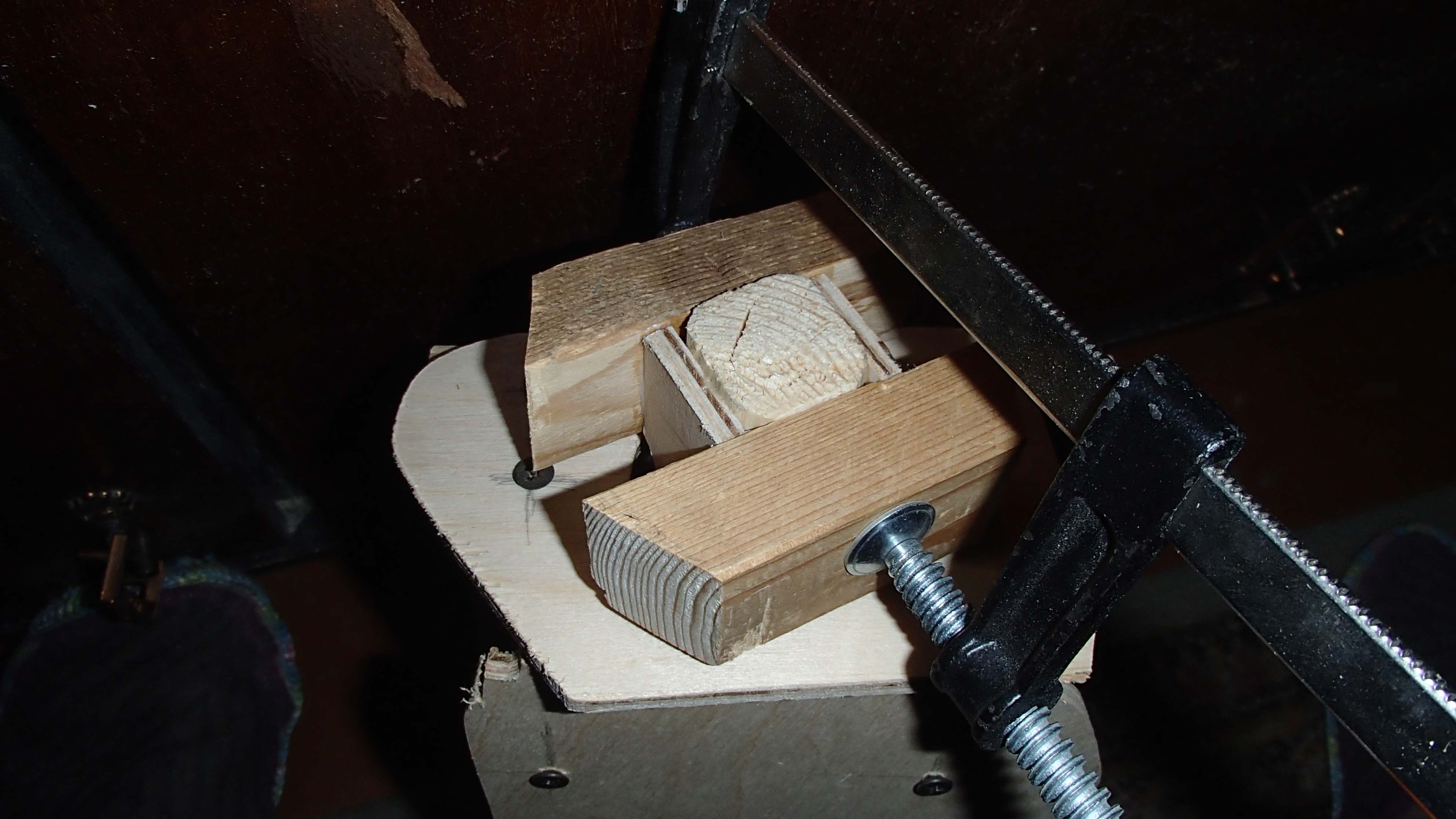
Шлифуем.

Вырезы для усовых гаек.

Клеим дальше.

С помощью этого прибора рисуем кружочки) Чтобы по нему просверлить отверстия для крепления рулевого колеса.

Дополнительно скручиваем все саморезами.

Прикручиваем руль через резину, чтобы можно было выровнять.


Крепление металлического вала к деревянному.


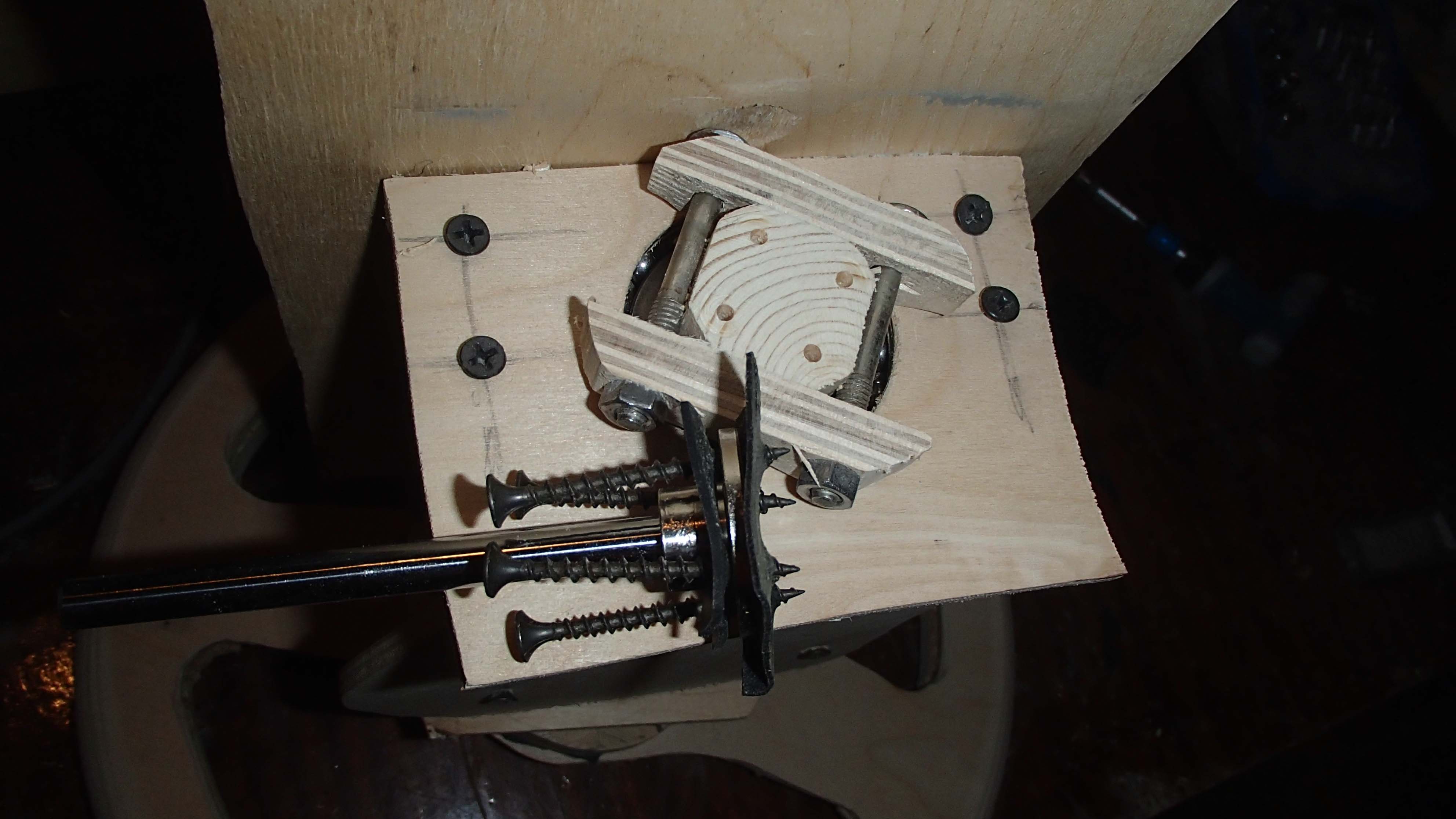
С помощью самореза выставляем ровно вал.

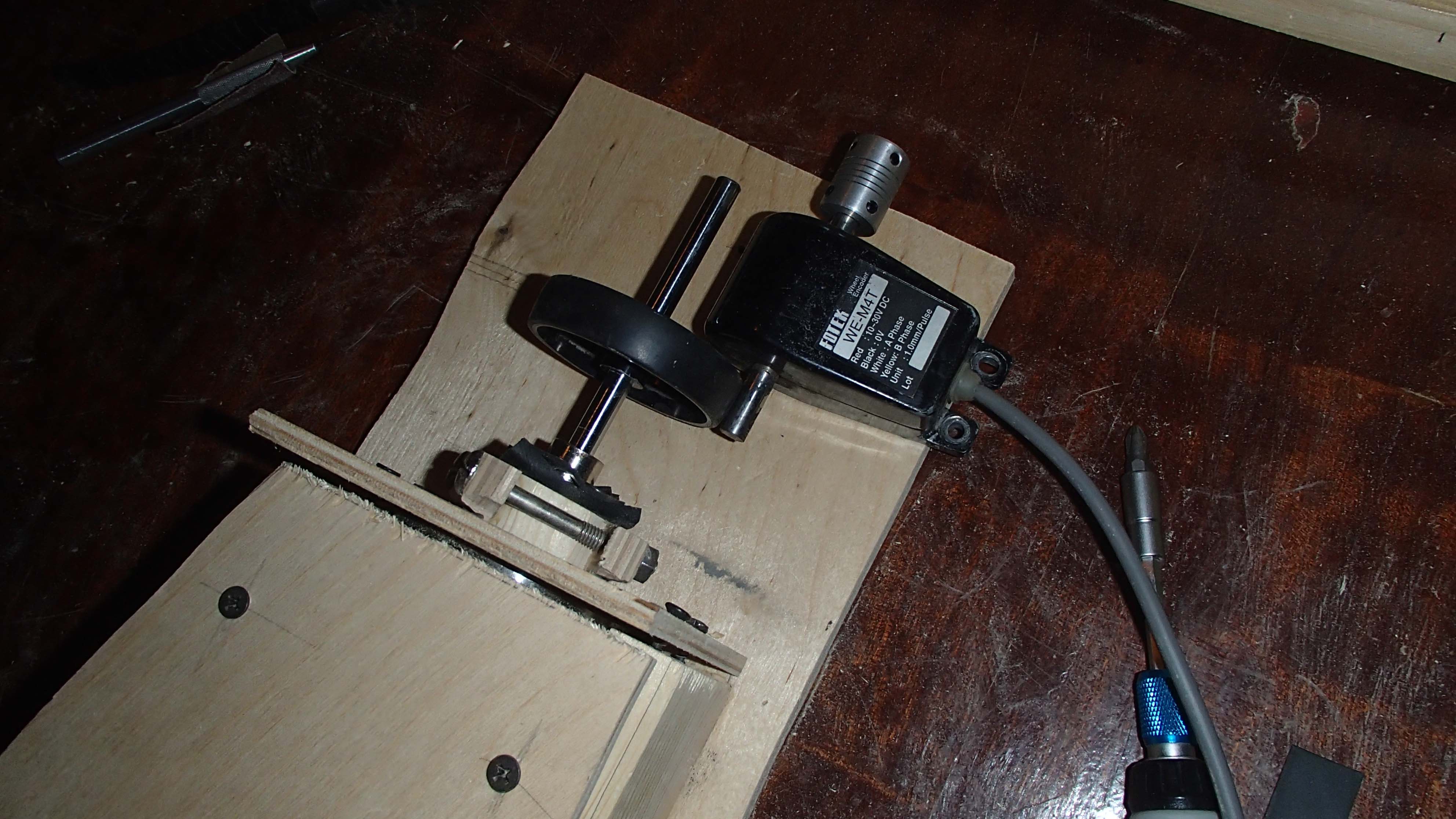
Крепление энкодера, а к концу вала будет крепиться двигатель.


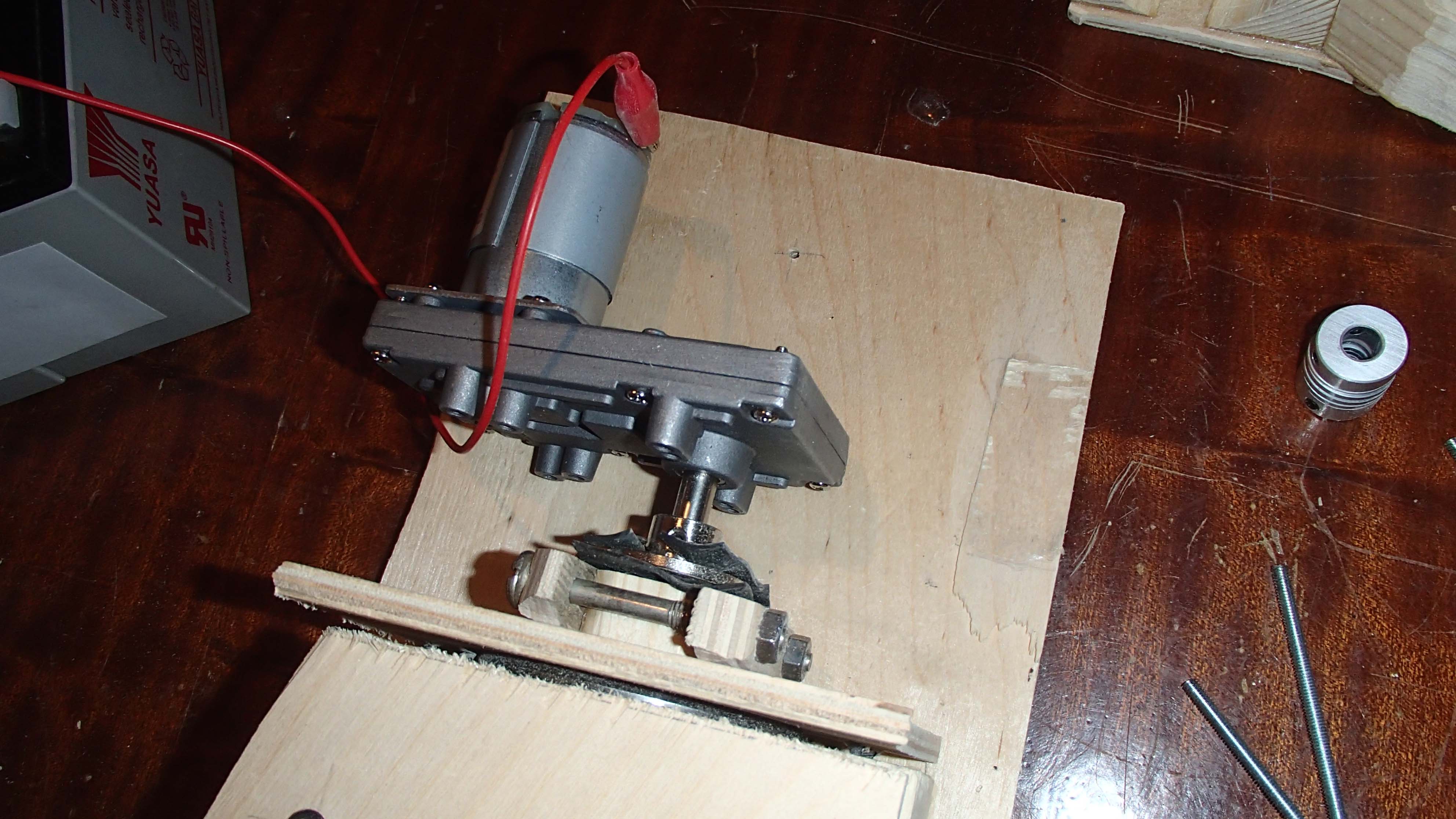
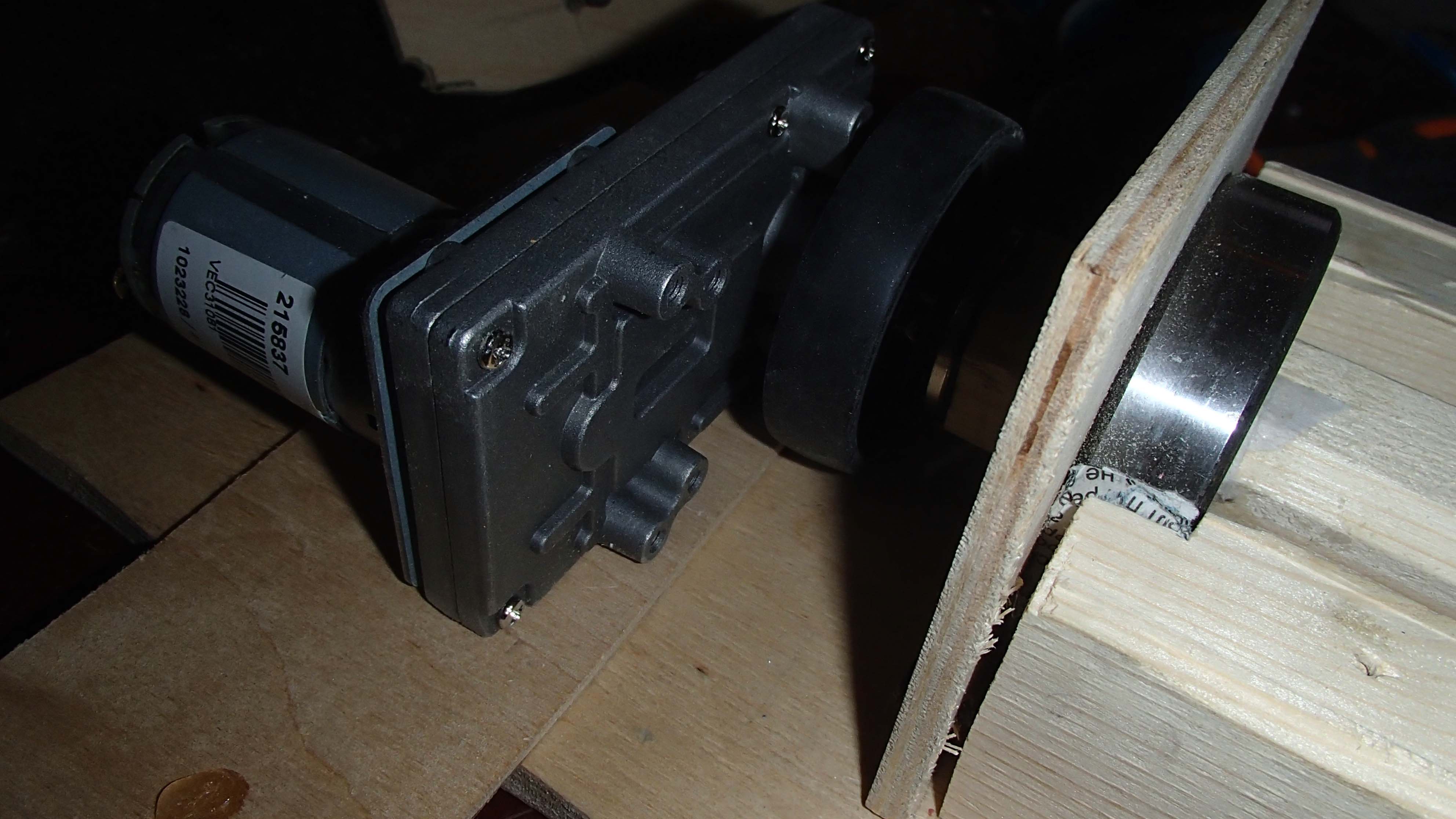
Наконец то пришел мотор с редуктором)


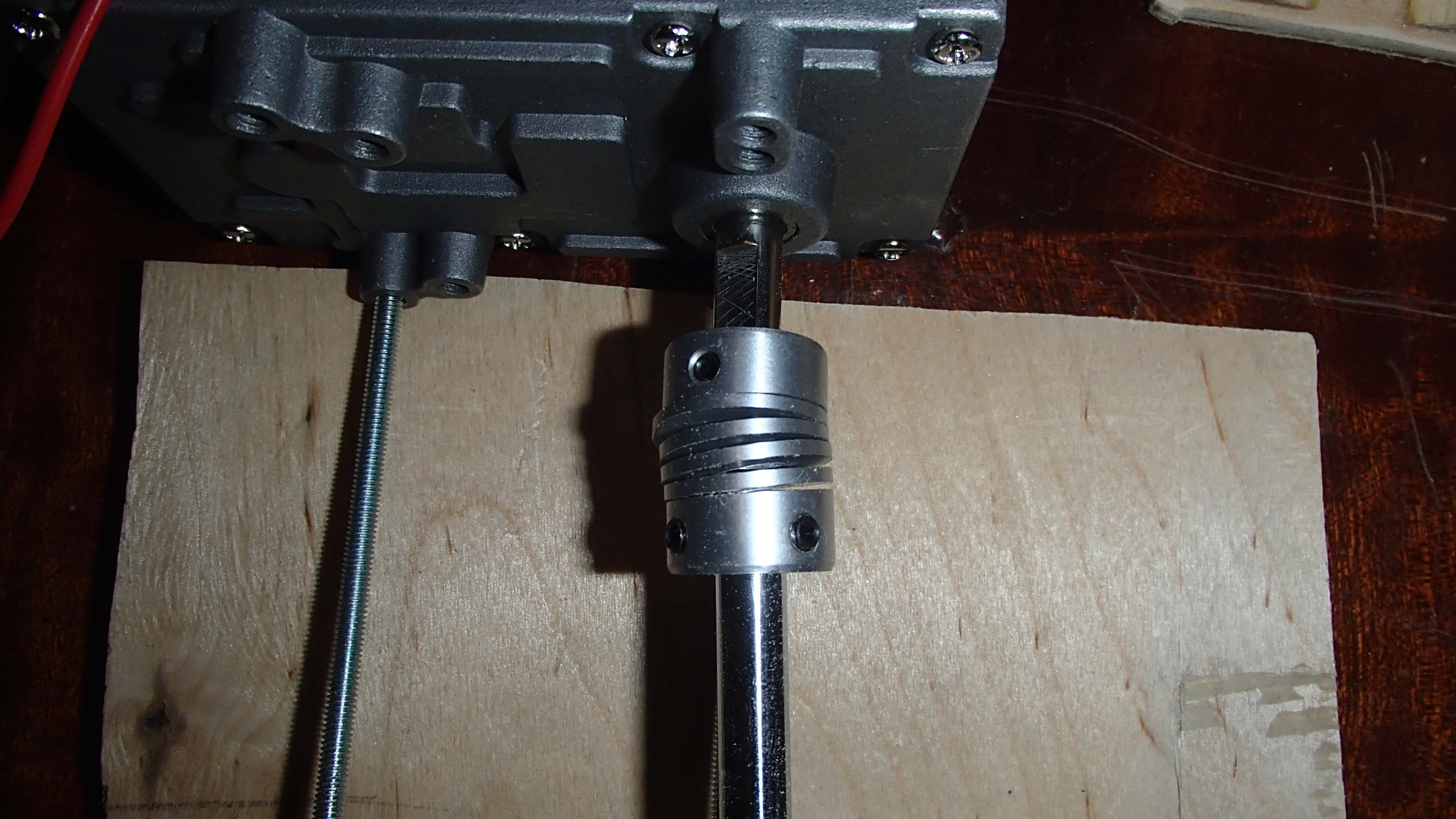
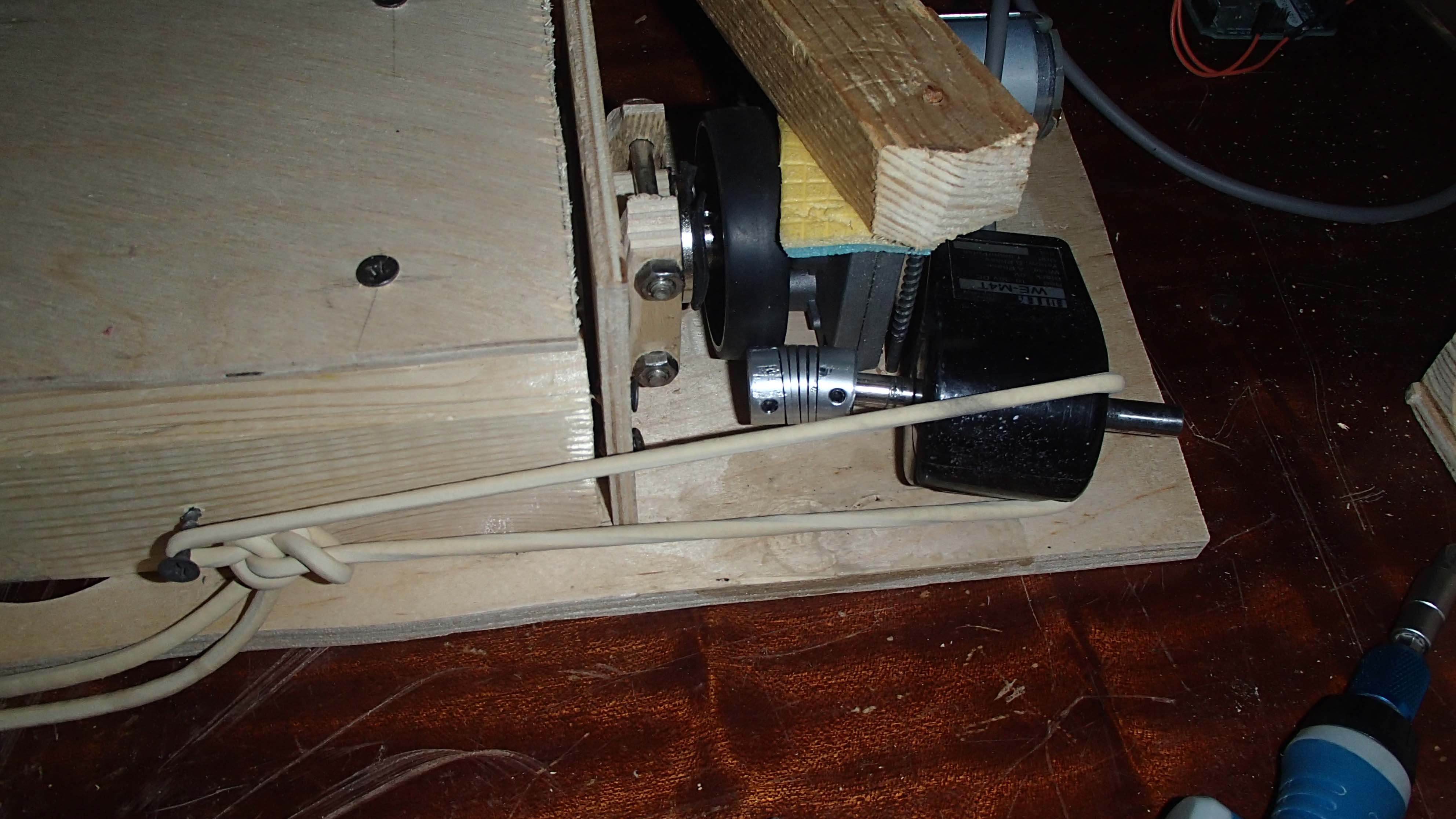
Крепление к валу через эластичную муфту.

Стоило зажать рулевое колесо и муфта не выдержала((, и это от 12 вольт, а питаться двигатель будет от 24.


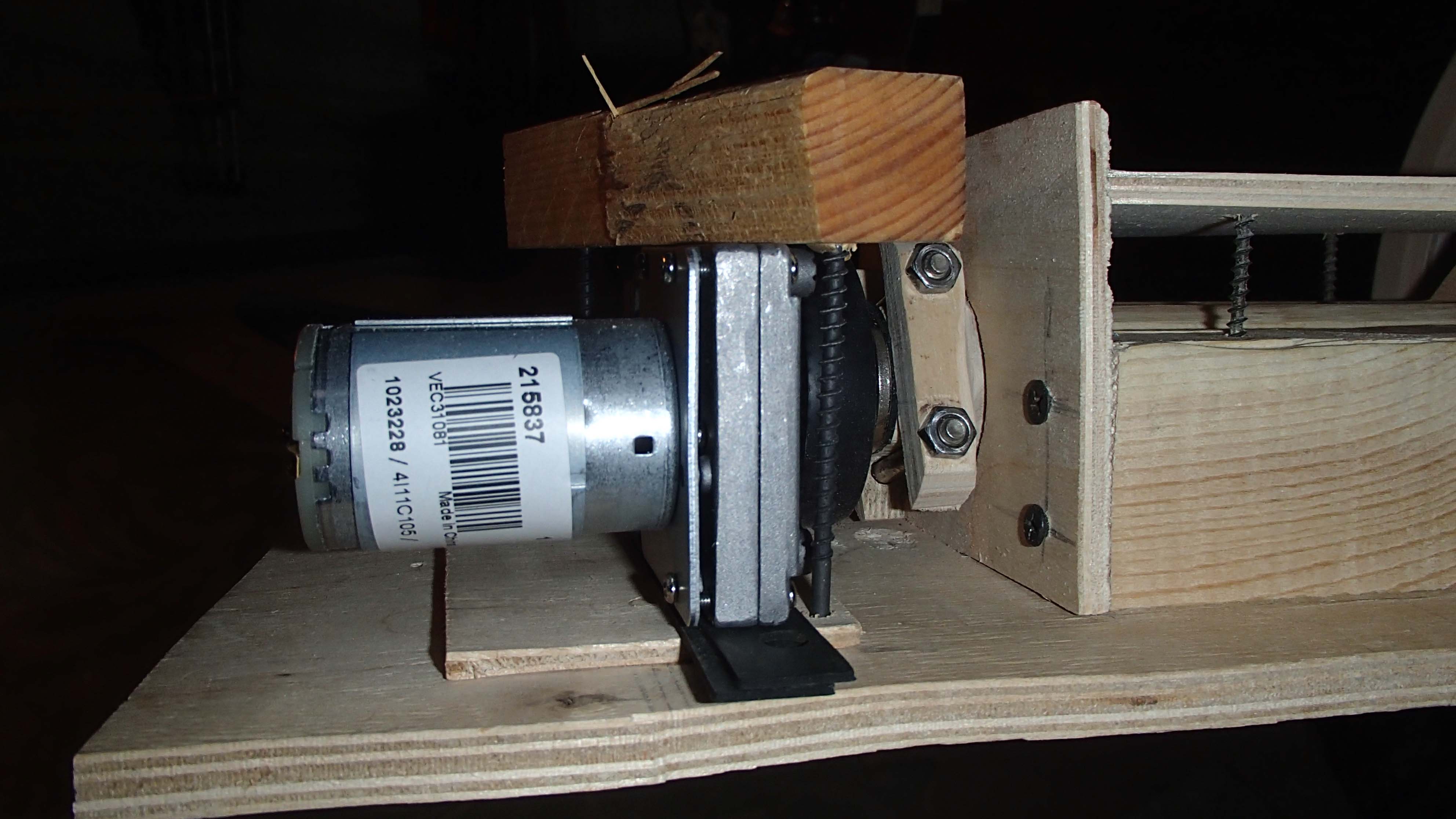
Решил прикрутить мотор напрямую. При это мотор немного гуляет в разные стороны, так все кривое.

Колесо для энкодера.

Долго клеим бумажки с разных сторон, потом шкурил, чтобы выровнять вал.

Приклеил фанерку под двигатель.
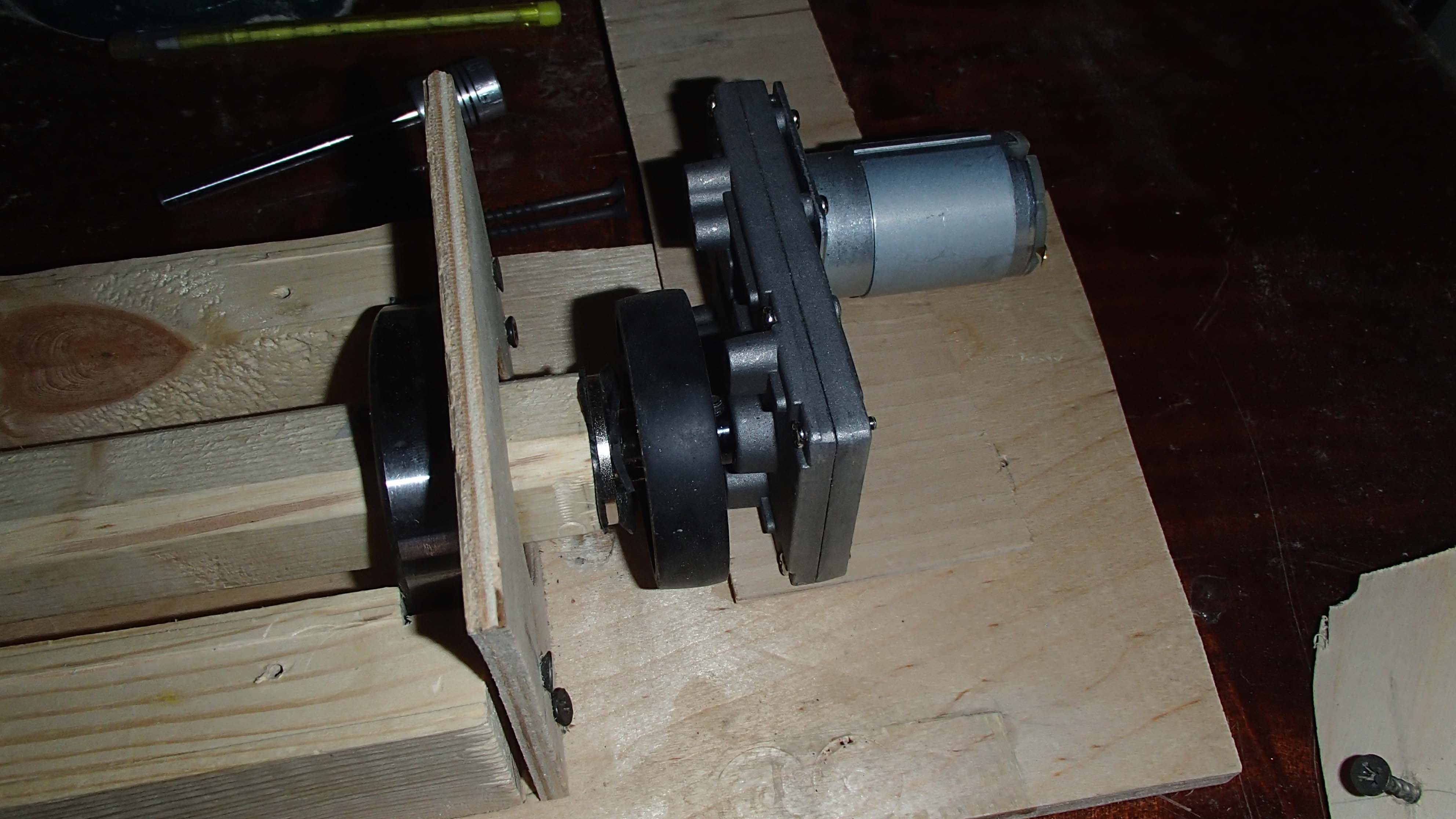
И подложил резины.

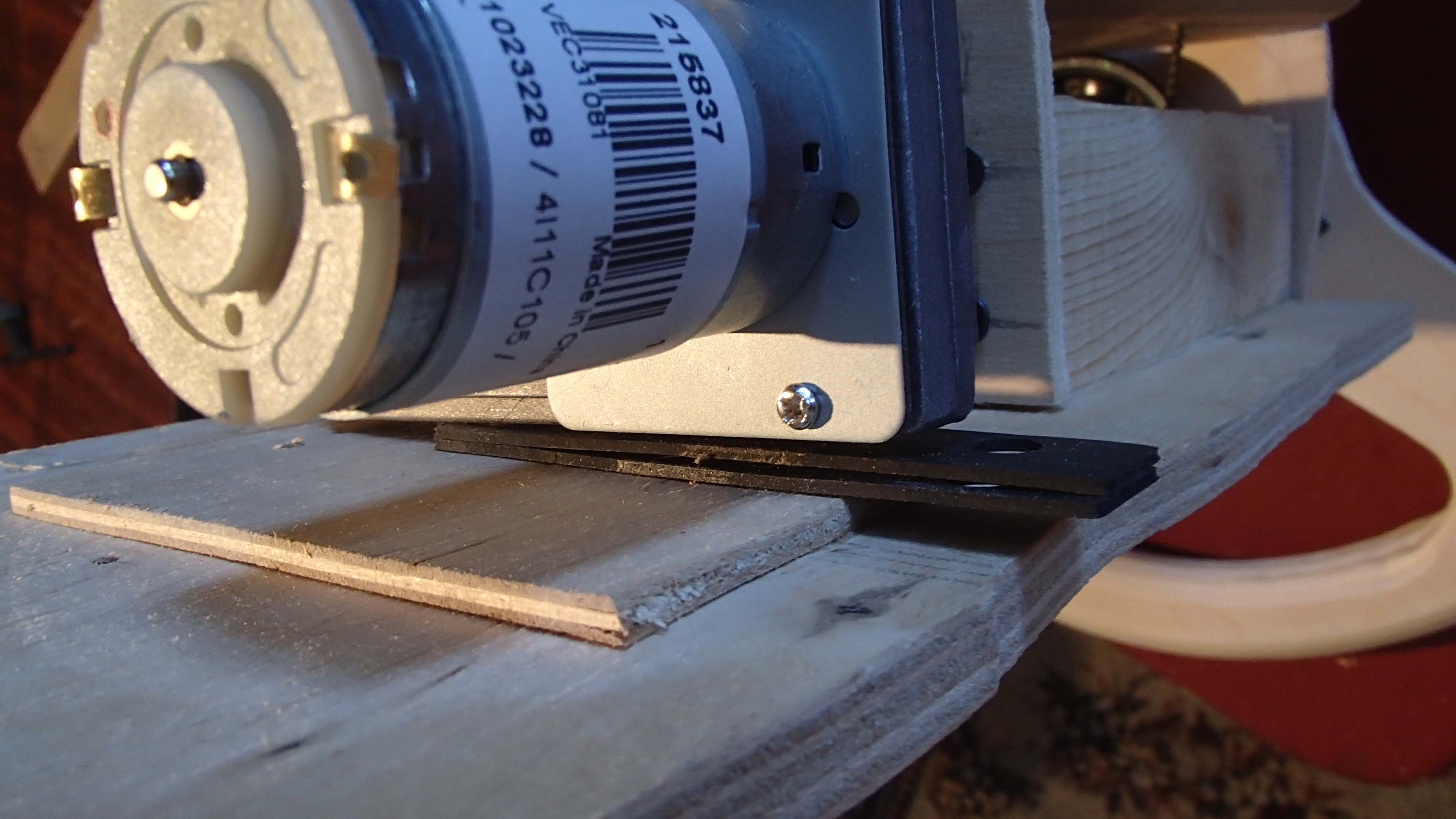
Прикрутил бруском.
Подложил под брусок кусок туристического коврика.


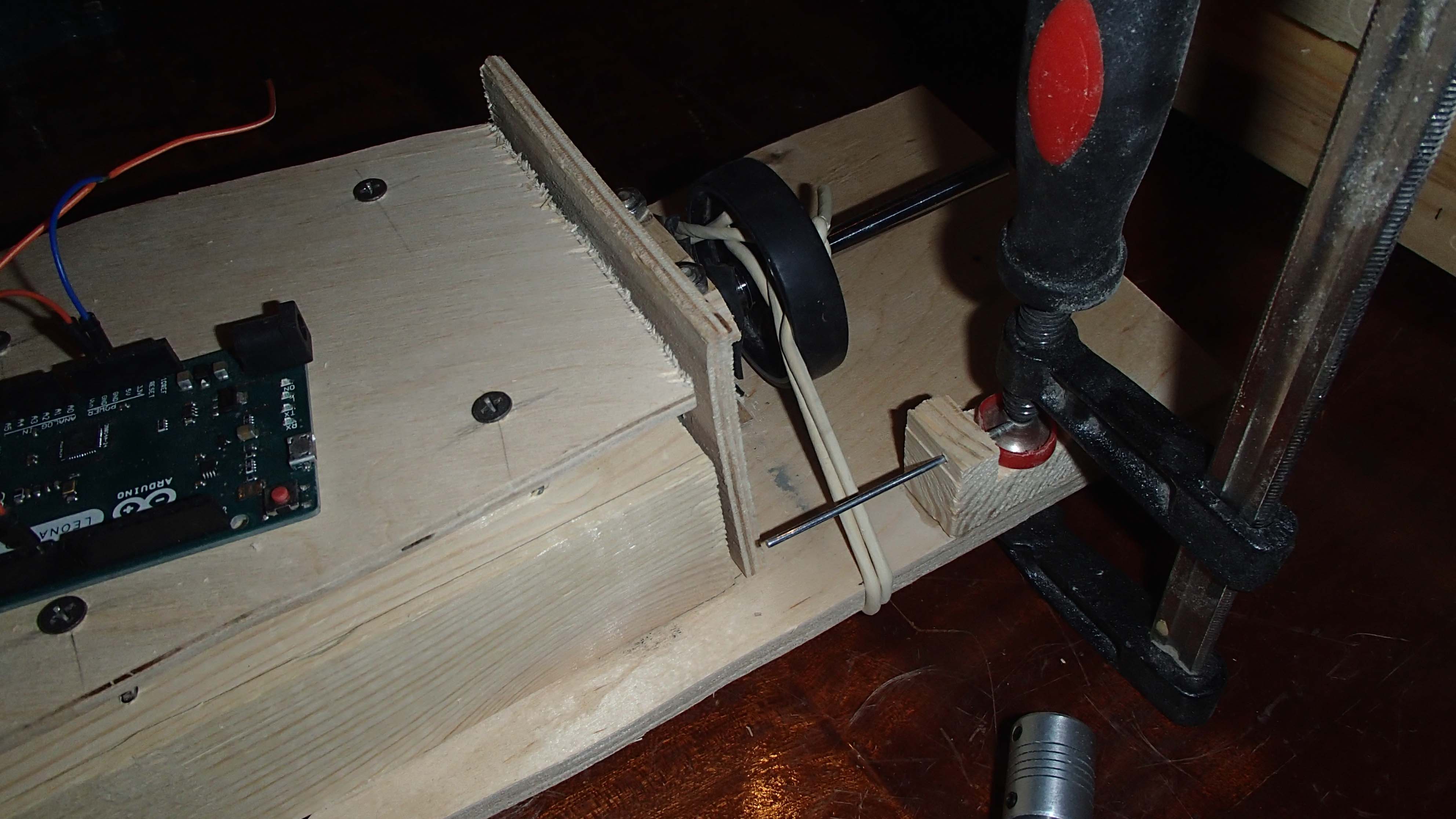
Крепление энкодера на одном саморезе, закреплен не жестко, может вращаться на саморезе.

Притягивается к колесу резинкой, в дальнейшем повесил на вал подшипник чтобы резинка не перетиралась.

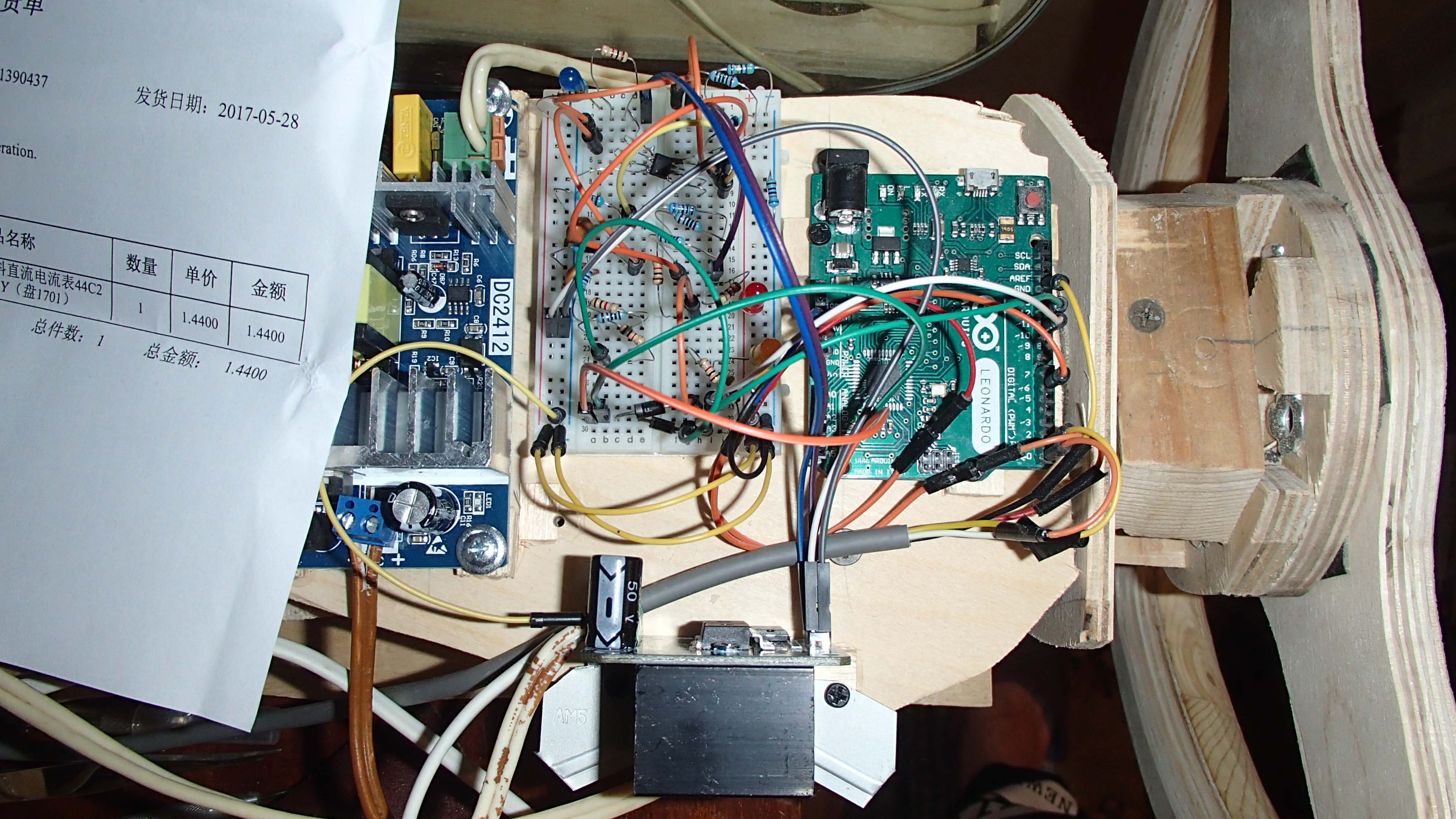
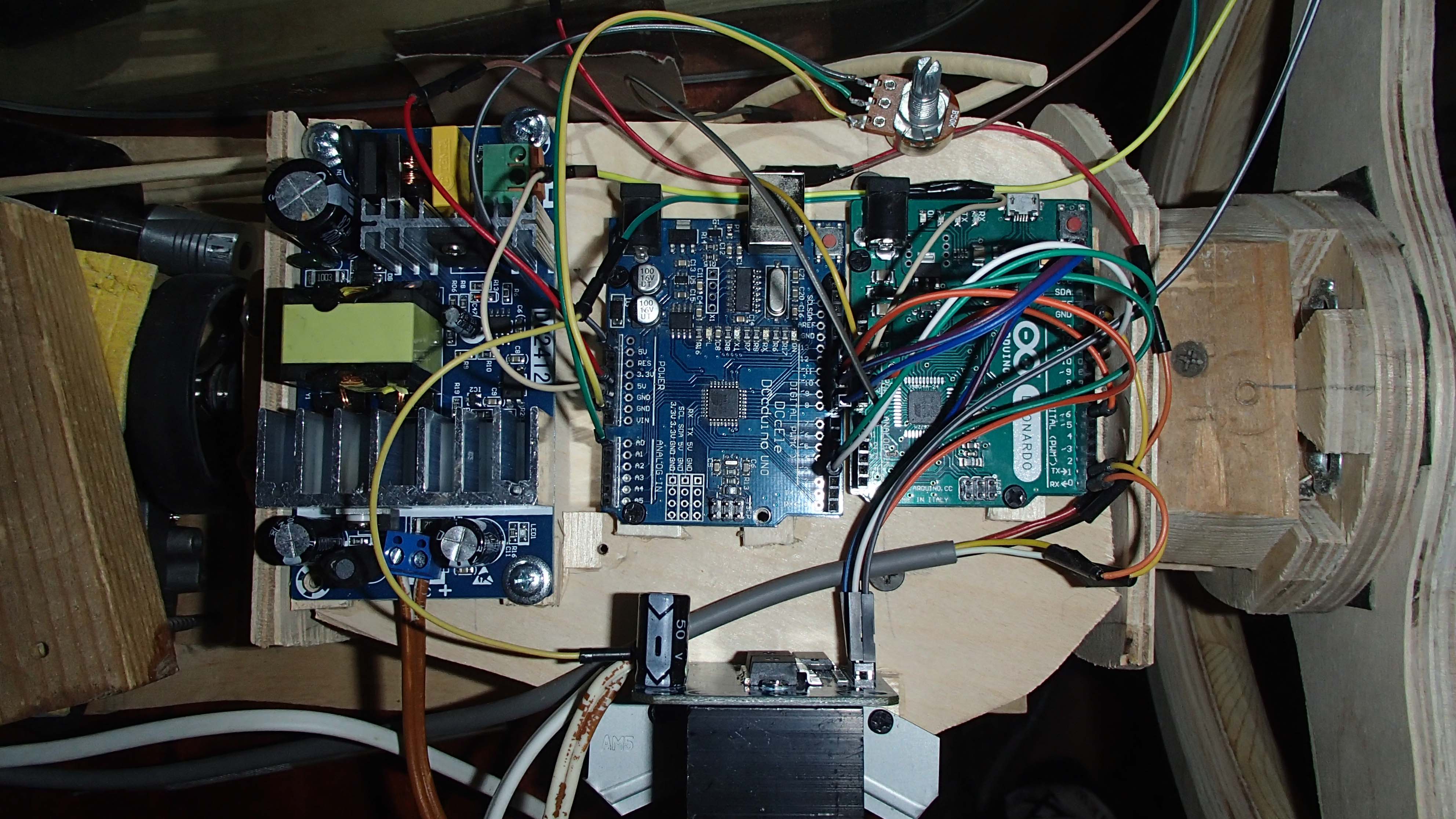
Располагаю электронику. Слева блок питания 24 вольт, 4 ампера, если зажать руль то он вырубается, видимо его не хватает, возможно придется купить помощьнее. Сверху макетная плата. Снизу драйвер двигателя. Справа ардуина.
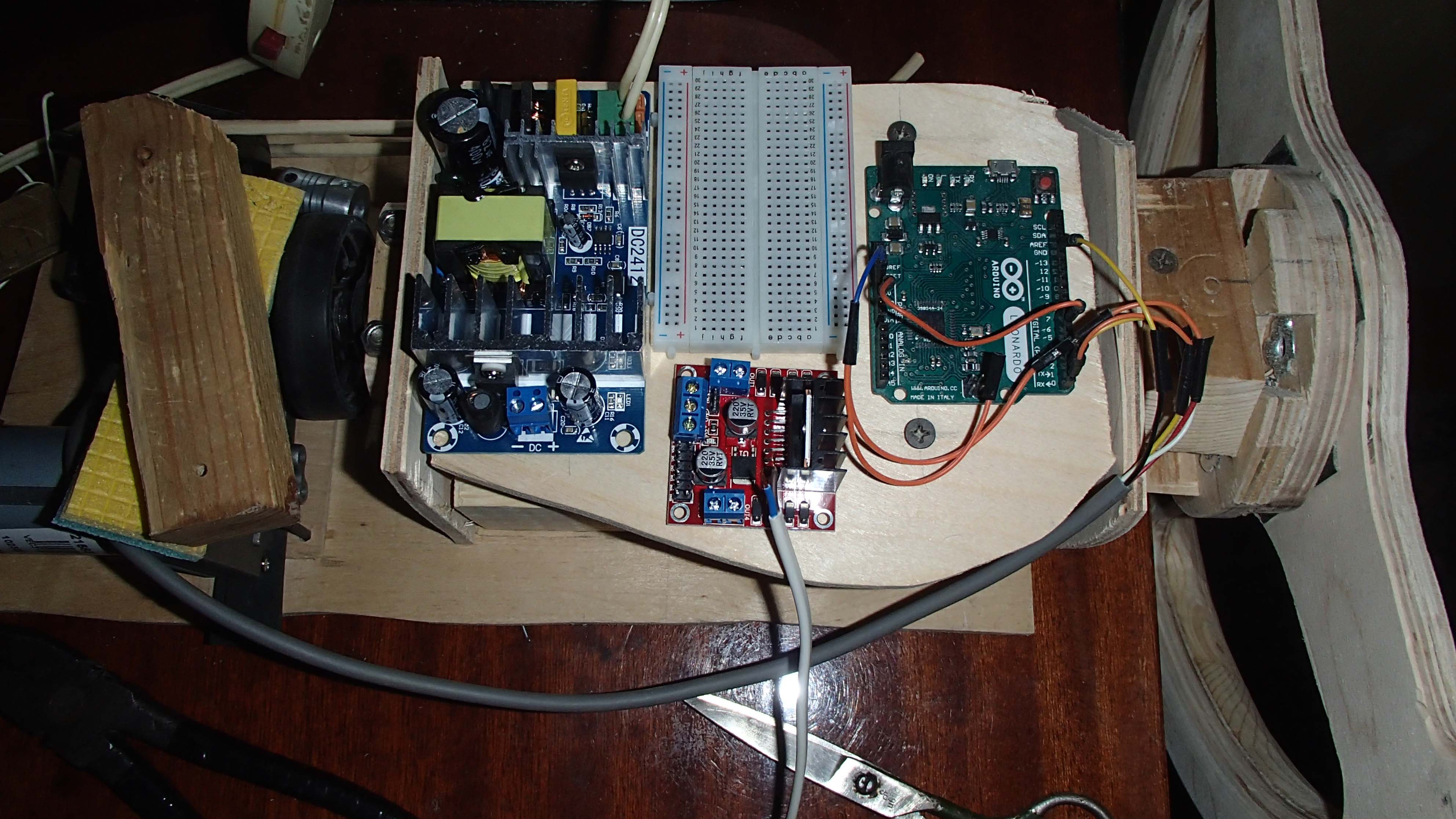
Наклеил деревянные накладки и насверлил в них отверстия.
Блок питания врикрутил саморезами. А остальное шурупами выкручеными из клавиатуры.
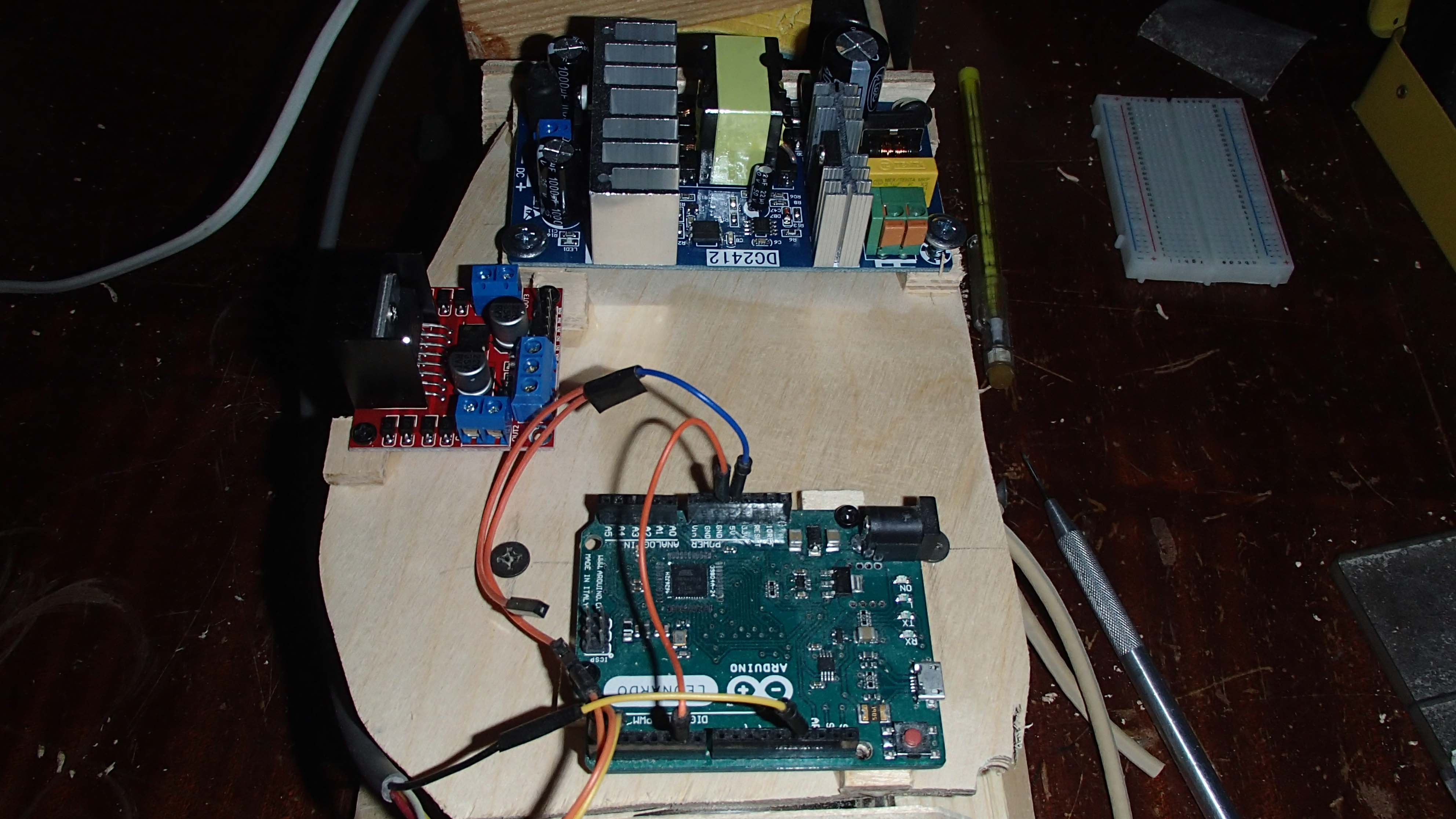
Макетная плата приклеена на двухсторонний скотч.
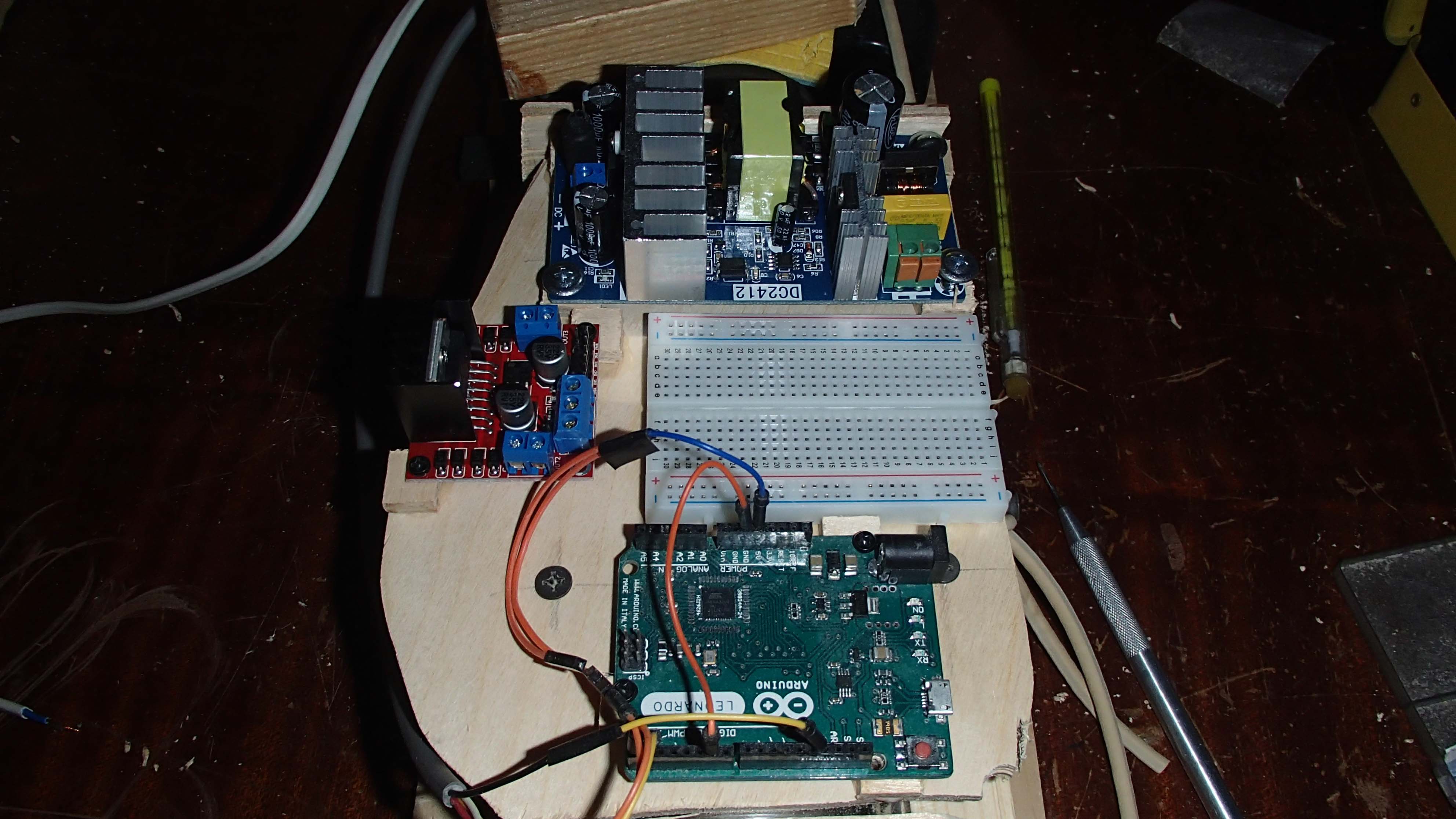
На макетной плате собрана схема для преобразования двух шим сигналов в один шим и 2 логических сигнала для драйвера двигателя.
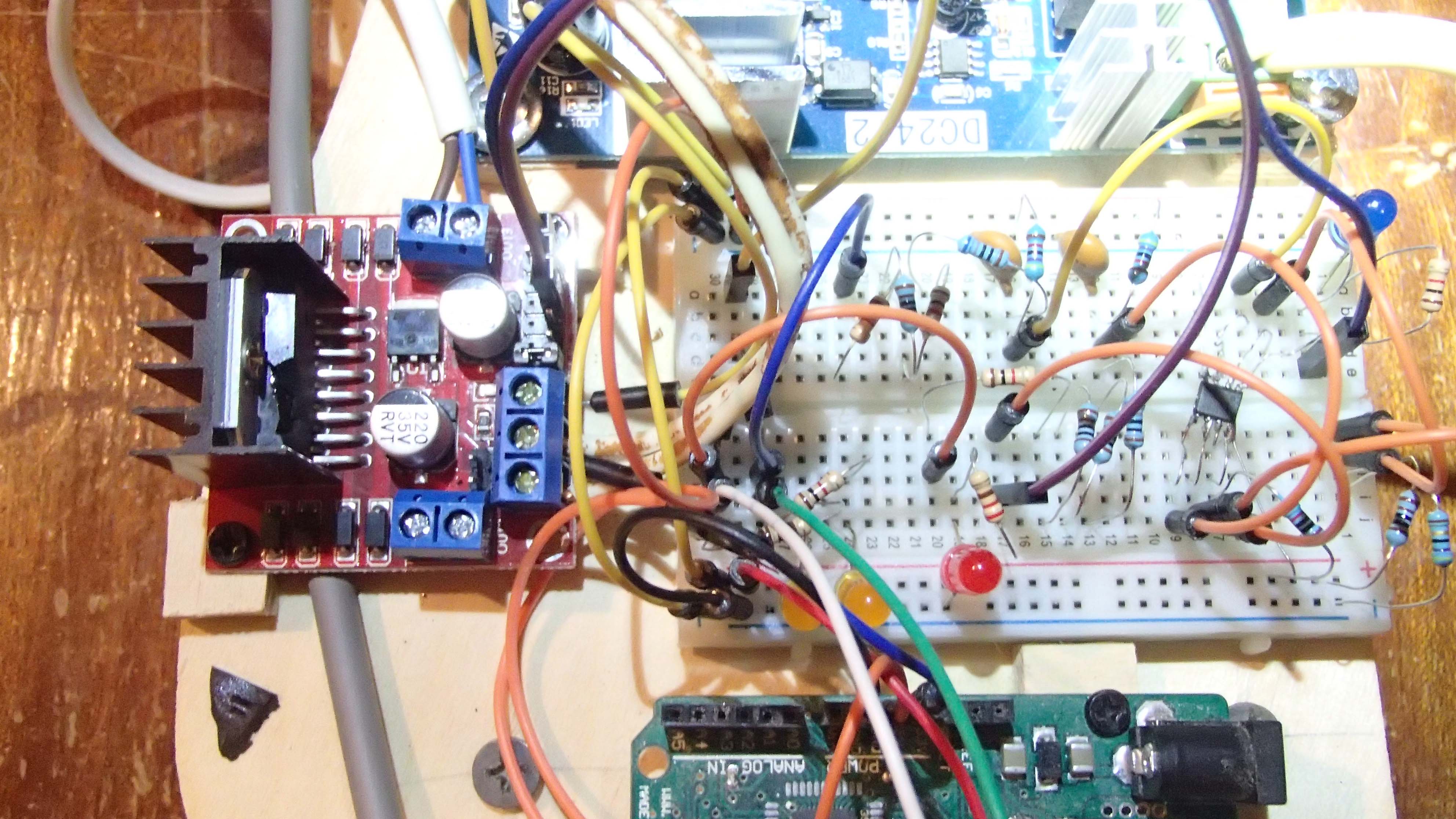
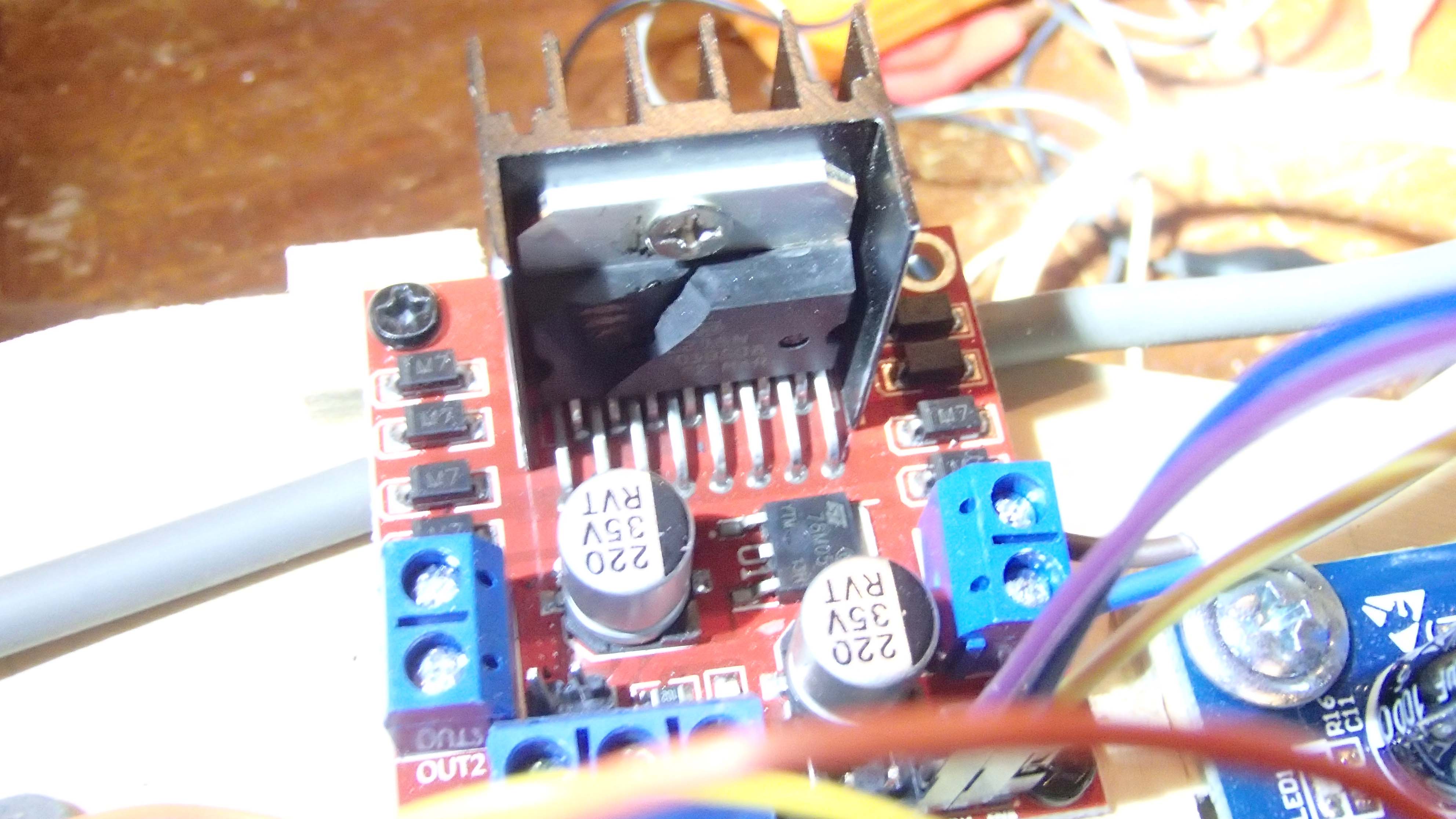
Драйвер двигателя красиво взорвался с искрами) Заказал помощнее.
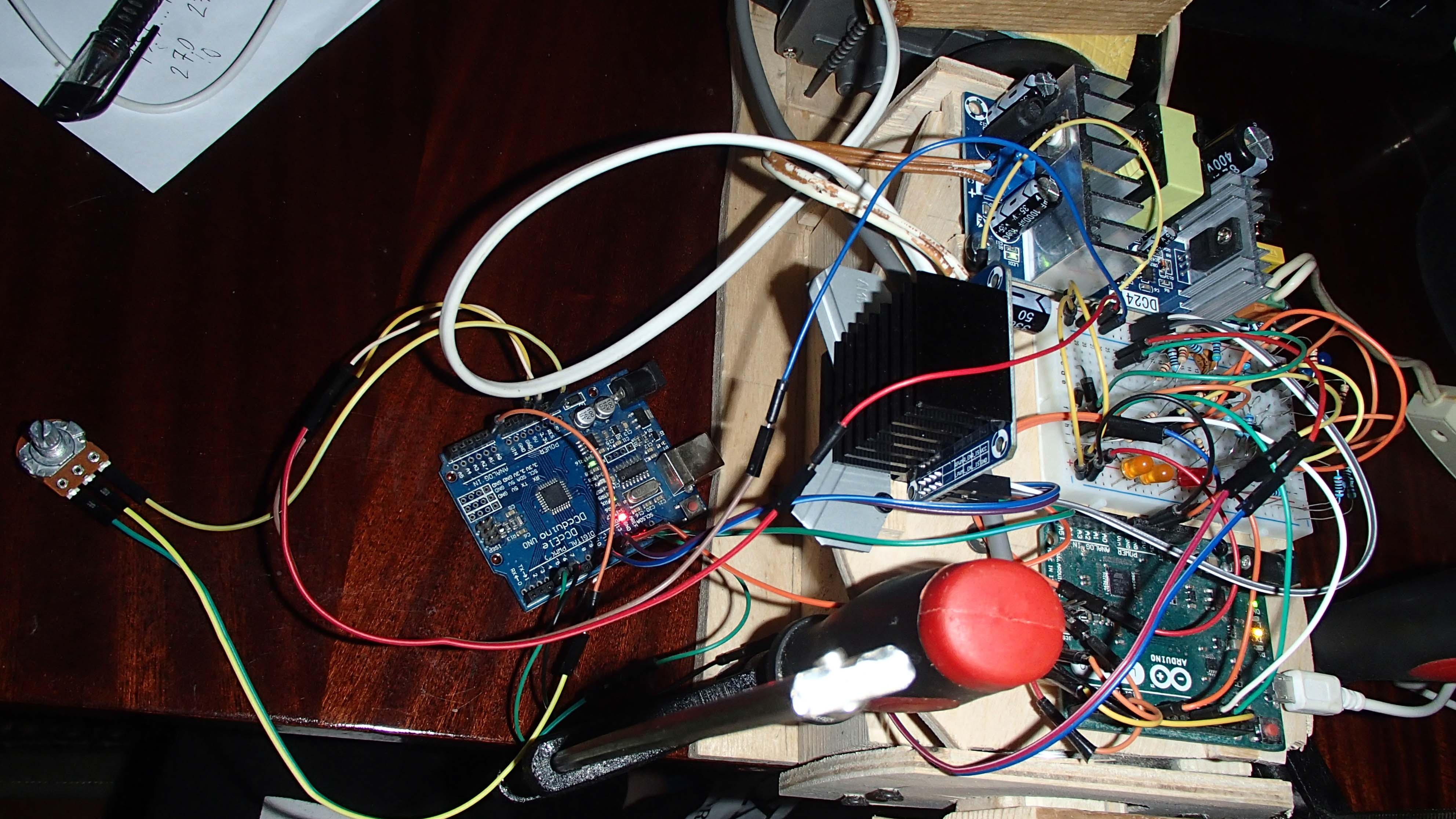
Пришел более мощный драйвер BTS7960.
Но оказалось что он работает не так как надо(хотя может так и должно быть), то есть при маленьком значении шима он двигатель уже совсем не крутит.
Пришлось использовать еще одну ардуину чтобы это исправить.
Вот исходники, но они пока что не идеальны(надо бы поработать на частотами ШИМ входящими и выходищими):
int a = 0;
int b = 0;
int c = 0;
int d = 0;
int e = 0;
int r = 0;
int right = 0;
int left = 0;
void setup()
{
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(3, INPUT);
pinMode(4, INPUT);
pinMode(5, INPUT);
Serial.begin(9600);
}
void loop()
{
a = pulseIn(3, HIGH,100);
b = pulseIn(4, HIGH,100);
e = d;
d = c;
c = analogRead(0);
r = floor((c+d+e)/25);
if (a>0){
right = r+(a* ((250-r)/50) );
analogWrite(10, right);
analogWrite(11, right);
digitalWrite(8, HIGH);
digitalWrite(9, LOW);
Serial.print("> - " +String(right) +" " );
}else{
if (b>0){
left = r+(b* ((250-r)/50) );
analogWrite(10, left);
analogWrite(11, left);
digitalWrite(8, LOW);
digitalWrite(9, HIGH);
Serial.print("< - " +String(left) +" ");
}else{
analogWrite(10, 0);
analogWrite(11, 0);
digitalWrite(8, HIGH);
digitalWrite(9, HIGH);
Serial.print("|");
}
}
}
К A0 подключен переменный резистор, с помощью него поднимается минимальная сила ШИМ(то есть крутится пока руль не будет возращаться полностью в центр).
Комментарии (9)
Вы просматриваете: http://steeringwheel.aggress.ru//index.php?fl=steerunit







Дмитрий говорит... Ответить
Ответить Permalink
Permalink Обжаловать
Обжаловать 0
0 0
0
Как можно сделать на одной ардуинке?
ОтветитьPermalinkОбжаловать003rd January 2020 9:58pm


aggress говорит...
Стопорит двигатель. Угол поворота настраивается в программе.
19th June 2019 5:54pm

Иван говорит...
А можно схему для драйвера l298n? Не совсем понятно, для него же надо один провод с шим и 2 других для управлением стороны вращения
8th January 2019 10:04am
aggress говорит...
Я уже не помню какая там схема была, сам вроде придумывал. Но она не очень работала, лучше использовать еще одну ардуину как в конце показано.
9th January 2019 7:38am

Макс говорит...
Привет, хочу повторить данную конструкцию, можешь скинуть на почту конечную схему, как сейчас работает ( с 2я ардуинками или нет) и схемку что на макетной плате. И как продвигается проект симулятора перегрузок - очень интересно. Sisadmin03@gmail.com
11th September 2018 11:09am
aggress говорит...
Работает сейчас в двумя ардуинами(схемка на макетной плате можно сказать не работает), вторая ардуина просто преобразует сигнал двух шим сигналов в один шим и 2 логических сигнала для драйвера двигателя.Проект перегрузок пока никак не продвигается, пока руки не доходят даже коробку передач доделать.
23rd September 2018 11:23am

Кот говорит...
Все пишут про подтягивающие резисторы, а может имеет смысл напряжение (на вход энкодера) дать больше? Я не то, чтобы учить пытаюсь, просто не зря же там интервалы от 5 до 24 вольт питание
то есть при маленьком значении шима он двигатель уже совсем не крутит.
Все пишут про подтягивающие резисторы, а может имеет смысл напряжение (на вход энкодера) дать больше? Я не то, чтобы учить пытаюсь, просто не зря же там интервалы от 5 до 24 вольт питание
28th July 2018 12:03pm

Алекс говорит...
Поэтому у тебя вышел из строя драйвер

25th March 2018 4:11pm

Страница 1 из 1