Главная
Электронника
AI WAVE 2016 wheel config
Рулевой модуль
Рулевое колесо из дерева
Стойка для руля с креслом
Педали
Деревянные рамы велосипедов своими руками
Я нашел два способа сделать руль с обратной связью, один на arduino leonardo а другой на STM32F4Discovery.
Начать решил с ардуины, в дальнейшем возможно попробую и STM32F4Discovery.
Минимум что необходимо это arduino leonardo и энкодер.
Необходимый софт:
AI WAVE 2016 wheel config
Прошивка для ардуины hex, нашел еще исходники какой то устаревшей версии, но пока не смотрел.
Программа для загрузки прошивки XLOADER
Установка
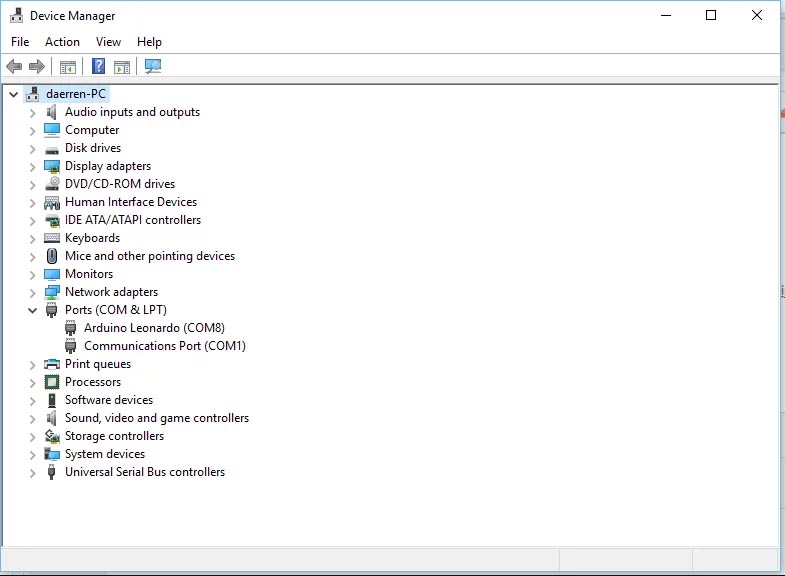
1. Подключите ардуину к компьютеру, проверьте Пуск-Панель управления-Диспечер устройств, посмотрите на Порты(COM и LPT), если там появился Arduino Leonardo то все нормально.
2. Установите AI WAVE 2016 wheel config. После установки запустите, должно появиться "new firmware found", нажмите yes, прошивка для ардуины должна загрузится автоматически. У меня к сожалению ничего не появилось и соответственно не загрузилось. Пришлось использовать XLOADER для ручной загрузки.
3. Запустите XLOADER.
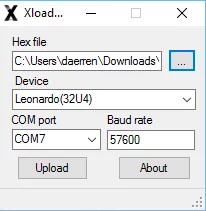
Укажите пусть к hex файлу, Device - Leonardo 32U4, а вот com порт нужно указывать не тот который сейчас, а тот который будет во время Bootloader режима.
Вот как нужно сделать:
Откройте Диспечер устройств. Смотрите на com порт который показывает у ардуины и во время этого нажмите на ней reset. Com порт изменится, вот его то и нужно указывать.
Ардуина будет в Bootloader режиме только несколько секунд, в этого время необходимо успеть загрузить hex файл.
После того как вы указали правильный com порт, и Bootloader режиме пропал, нажмите опять на ресет, и когда com порт измениться жмите на Upload.
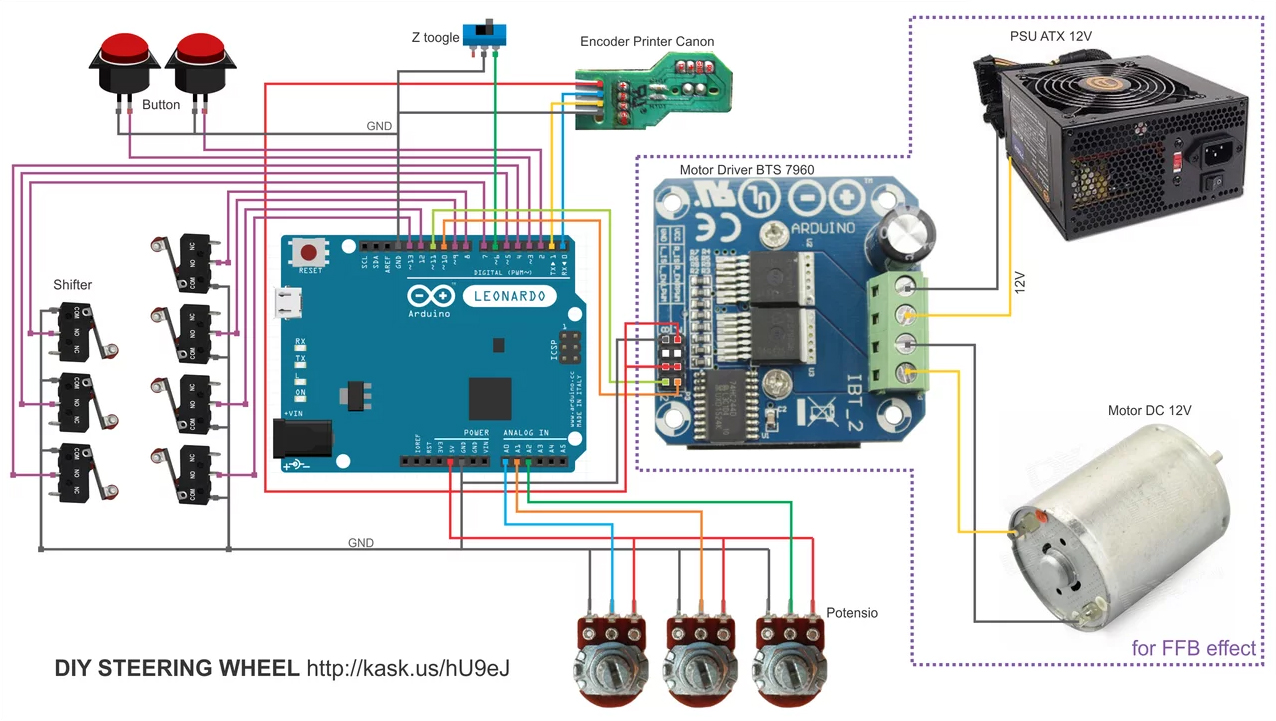
Вот примерная схема подключения.
Запустите AI WAVE 2016 wheel config. Для запуска с дополнительными настройками в свойствах ярлыка в Объект: допишите -dev.
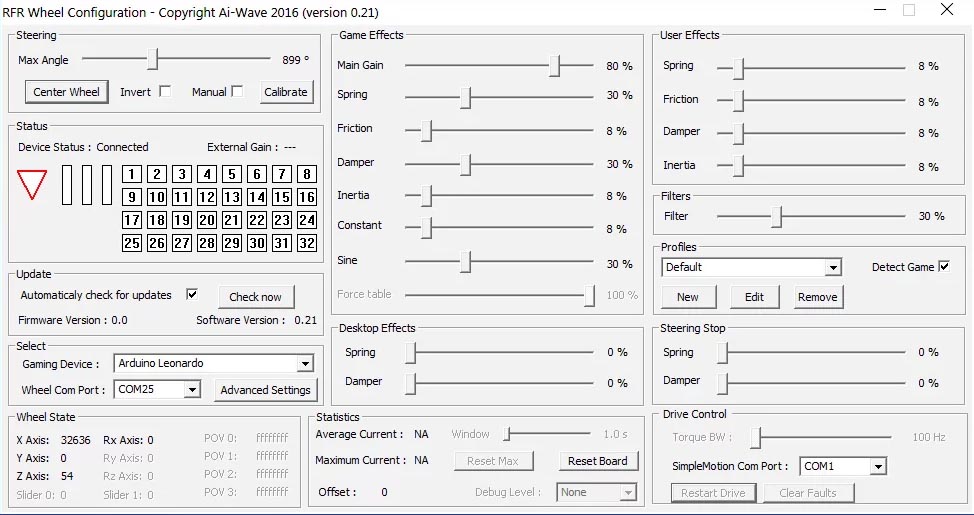
Если Firmware Version у вас показываться 0.0, то разъедините Z toogle(замкнутый 6 pin на землю) и повращайте рулем, версия должна измениться на 0.16. После этого опять замкните контакт.
Откройте Advance Setting.
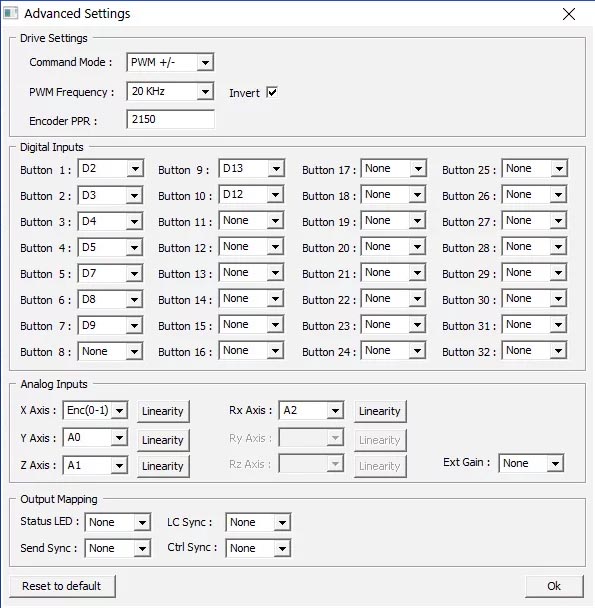
Укажите Command Mode : PWN +/-, при этом по 10 и 11 pin'у будет идти шим сигнал для поворота двигателя влево и вправо.
Укажите PWM Frequency : 20KHz.
Encoder PPR необходимо указывать сколько импульсов с вашего энкодера поступает за оборот.
В Digital Input можно указать куда подключены ваши кнопки, а в Analog Input оси, руля, газа и тормоза например.
Сделал небольшой стенд для проверки.
Вот разобрался как подключить по 4 кнопки к одному пину, с помощью этого можно использовать все 32 кнопки. Значение резисторов точно найти не смог, сам использовал вот такие, с ними все работает(мерял мультиметром, могут не совпадать с представлеными ниже номиналами резисторов из-за их неточности).

Вот как я их составил. R5(6.8k), R4(0.47k+0.22k+0.68k+4.7k), R3(1k+1k+0.68k), R2(0.68k+1k), R1(0.1k+0.47k).

Информацию взял отсюда https://www.kaskus.co.id/thread/54c59a266208812a798b456b.
Для STM32F4Discovery загляните сюда https://forum.virtualracing.org/showthread.php/92420-DIY-USB-Force-Feedback-Controller.
Комментарии (106)
Вы просматриваете: http://steeringwheel.aggress.ru//index.php?fl=electro







Dmitry говорит...
...Также при калиброке(manual) кручу руль, но ничего не происходитя, постоянно высвечивается searching index
 Ответить
Ответить Permalink
Permalink Обжаловать
Обжаловать 0
0 0
07th January 2020 9:54am

Андрей говорит...
А вместо энкодера можно использовать потенциометр?
10th February 2019 3:35am


DmitryP говорит...
А датчик холла можно подключить? Т.к. с оптическим хнкодером не получилось
10th February 2019 9:58pm
aggress говорит...
Не знаю, если он будет подавать такие же сигналы как энкодер то можно.
11th February 2019 4:41am
Dmitriy говорит...
А какой номинал резисторов лучше использовать? Пробовал подключать на 100 кОм но хода педалей не хватает. Можно ли как-то исправить или нужен другой номинал?
8th February 2019 1:41pm
aggress говорит...
У меня на 5 вроде, но и на 100 должно работать. Можно попробовать настроить в Пуск-Панель управления-Устройства и принтеры, при подключенном устройстве там оно появится и настроить ходы все.
8th February 2019 1:56pm
 [/url]
[/url]aggress говорит...
Тут, надо arduino подключить, и оно должно быть тут видно как джостик. У него не помню точно, вроде калибровку можно будет произвести.
8th February 2019 2:42pm
aggress говорит...
Подойдет, влияет на "разрешение руля", чем больше тем лучше. Например если допустим руль диаметром 30 сантиметров, то его окружность будет 300*3.14(PI) = 942 мм, делим на 400 получится 2.355 миллиметра, то есть если сдвинуть край руля на 2 миллиметра то руль в игре не повернется, только при превышении 2.355 миллиметра начнет поворачиваться. В принципе этого достаточно.
5th February 2019 4:08pm

Страница 6 из 10